3Dデータは、自律走行、ロボット工学、拡張現実など、幅広い業界で一般的に使用されているため、正確な3Dトレーニングデータセットの構築は、AIモデルの開発にとって極めて重要です。3Dデータはモデルのパフォーマンスを向上させる重要な要素と考えられており、最も価値のある3Dデータの種類の1つがポイントクラウド(点群)データです。本日、Superbプラットフォームでポイントクラウド(点群)データにラベル付けできるようになったことを発表できることを嬉しく思います!
ポイントクラウド(点群)とは?
3D空間内のオブジェクトまたはエリアを表すデータポイント群
点群とは、主にLiDARセンサーを使用して取得された3次元データの離散的な集合です。これらの点は、3D空間内のx、y、z座標を持つ個々のデータ点を表し、センサーによってスキャンされます。点群は3D空間を表現するために使用され、仮想現実(VR)、拡張現実(AR)、複合現実(MR)、自律走行など、さまざまな産業で広く採用されています。
動画の撮影方法と同様、点群も通常、順次キャプチャさ れます。通常、画像データよりも低いフレーム速度(5~10fps)で撮影され、各フレームはスキャンと呼ばれる。点群データは拡張子*.pcdで保存されることが多く、LiDARセンサーとx、y、z座標で表される多数の点に関する情報が含まれる。自律走行シナリオでは、1つのフレームに数万から数百万のポイントが含まれることがあります。大規模な点群の場合、都市のような広いエリアを表現するために、その数は数十億に達することもある。このような点群は、複数のスキャンを1つに統合することで生成されます。

: 点群データを収集する空間の高解像度情報を捉えるセンサー技術
LiDARはLight Detection And Rangingの略で、点群データの取得に役立つセンサー技術です。LiDARはパルスレーザーの形で光を利用し、センサーと対象物の距離を遠隔で測定します。この技術は、自律走行車によく見られるダイナミックな3Dモデルを生成するために使用することができます。
LiDARでエリアをスキャンすると、点群からなるデータセットが作成され、それぞれがx、y、z座標を持ち、中にはRGBの色情報を含むものもあります。
LiDARとポイントクラウド(点群)データの違いは?
LiDARは点群データを取得できるセンサーで す。しかし、すべての点群がLiDARで生成されるわけではありません。デジタルカメラで撮影した画像から点群を生成することもできます(写真測量)。写真測量の点群データにはRGB値が含まれるため、色情報を含む点群データとなります。
すべてのデータプロジェクトに高い精度が要求されるわけではありません。従って、データ収集と処理に必要な時間、スキャニングの規模、必要な詳細の精度、スキャニング結果の使用目的などを考慮し、どのオプションが最も効果的かを見極めることが重要です。
ポイントクラウド(点群)データの必要性
点群モデリングは、LiDARセンサーが提供する正確な距離測定データを使用して、オブジェクトの位置、サイズ、向きを認識します。このアプローチは、3Dオブジェクトの幾何学的構造、形状、空間的関係を正確に表現します。モデル化された環境の精度が高ければ高いほど、自律走行はより安全になり、ユーザーは現実世界と同じように仮想環境を探索し、相互作用することができます。
例えば、仮想世界では、ユーザーと物体や表面との距離を現実世界の対応するものと一致させることが非常に重要です。この機能により、ユーザーはバーチャル・リアリティに完全に没入し、物理的な世界と同じように探索し、相互作用することができます。
つまり、点群データを使った3Dモデリングは、オブジェクトの正確な位置やサイズといった空間精度を実現し、よりリアルな仮想現実や自律走行環境を提供する高性能なモデルを作成するのに役立つのです。
Superbプラットフォームでポイントクラウドを処理することで、どのようなメリットがあるのか?
従来、点群データを分類する作業は手作業で行われており、大量のデータを手作業でラベル付けする必要がありました。当然、時間もかかるし、正確性に欠けることも多かったです。しかし、時代が進み、技術が進歩するにつれて、データを自動的に分類できるようになりました。Superb Labelで点群データを処理する利点は以下の通りです:
- 卓越した情報の粒度
ラベル付けされた点群データは、物体の情報を細かい粒度で提供します。
3D空間と物体の境界がさらに明確になり、物体の位置、境界、向きが正確に特定されます。
- 高精度3Dトレーニングデータセット
点群データは詳細な空間情報を持っており、ラベリングの品質を向上させる上で重要な役割を果たしています。この情報を利用することで、ラベリングプロセスにおいて、形状、サイズ、位置など、オブジェクトの実際の特性にマッチしたアノテーションを作成することができます。
- 効率的な3Dモデルのトレーニングおよび検証
Superb Labelで正確にラベル付けされた点群データを使ってトレーニングされたモデルは、オブジェクトや空間の特性を詳細に理解し、モデルの性能向上に大きく貢献することができます。
点群データプロジェクト - Superb Labelで始めましょう
- Step 1: メタ情報ファイルの作成
点群データ(PCD)は、自律走行シナリオにおいて、LiDAR以外のセンサーで取得された情報と同時に使用されることが多い。そのため、点群シーケンスには、LiDARによって取得された点群データファイルだけでなく、PCDとともに収集された画像データも含まれることがあります。また、IMU(慣性計測ユニット)センサーによって記録された取得位置やその他の詳細情報も含まれるかもしれない。ここで、PCDをデータラベリングやAIモデル学習に使用するためには、同期やキャリブレーション情報を保持するメタ情報ファイルが必要であることに留意してください。
- Step 2: 点群データをアップロードする
SDK Upload
from spb.exceptions import ParameterException, ConflictException pointcloud_sequence_path = './data/pointcloud/50-frames.pcd' dataset='pointcloud-test' pointcloud_data = client.upload_pointcloud_data( manifest_file_path="{manifest file - json}", //local path of the file dataset_name="{dataset_name}",// the name of an existing dataset (Or, you can use a name of a dataset that you are yet to create.) data_key="{data_key}" // You can write and upload a data_key of your choice.)
Superb Labelからの点群データアップロード

画像ファイルとは異なり、アップロード前に点群ファイルを開いてエラーがないか検査することは困難です(点群ファイルが破損している場合も同様です)。 .pcdファイルをアップロードした後、エラーのためにファイルを開くことができない場合は、カスタマーサポートマネージャーにご連絡いただくか、support@superb-ai.comへ直接ご連絡いただければお手伝いさせて頂きます
Superb Labelで点群プロジェクトを作成した後のデータアップロード



- Step 3: 点群に自動でラベル付け
点群データを扱う場合、基本的な(事前に訓練された)オートラベリングモデルでは、物体を正確に識別することはまず不可能です。画像やビデオデータの場合、ハードウェア(カメラの種類)は出力に大きな影響を与えませんが、LiDARの場合はそうではありません。例えば、センサーAで収集されたデータでトレーニングされたモデル(事前にトレーニングされたモデル)は、センサーBで取得されたデータではパフォーマンスが低下する可能性が高いです。
このような状況では、事前に訓練されたモデルによる点群の自動ラベル付けは有効ではないかもしれません。その代わりに、少量のラベル付きデータでモデルをトレーニングすることで、より良いパフォーマンスが得られる可能性があります。そのため、点群データの一部を手動でラベル付けし、CAL(Custom Auto-Label)を使用して結果を改善することを推奨します。
ポイントクラウドはどんなものに使えるか?
- 自動運転
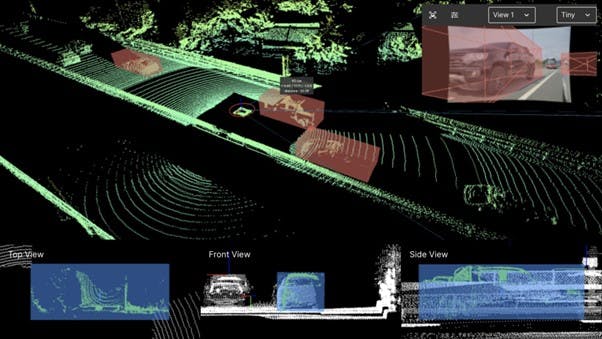
自律走行車は、安全運転のために周囲の環境を正しく認識する必要があります。そこで、車両に取り付けられたLiDARセンサーによって生成された点群データは、周辺環境とその距離に関する3次元データを提供します。
Superb Labelで点群モデリングを行う場合、自動ラベリング機能により、自動車、歩行者、自転車、道路インフラなど様々なオブジェクトに自動的にラベリングすることができ、モデルの学習時間を大幅に短縮することができます。
- 拡張現実とバーチャルリアリティ
点群データは、没入感のあるARやVR体験を構築するのに非常に役立ちます。点群を使用した空間モデリングは、AR/VRシステムが現実世界に見分けがつかないレイヤーを追加するのに役立ち、ユーザーは周囲の環境と積極的に相互作用し、よりリアルな体験を楽しむことができます。
- 建設業と設計
点群データは、建設現場で現場のモデリング、衝突検出、品質管理などに利用できます。これにより、作業効率が向上し、ミスが減り、最終的にプロジェクトを完璧なものに昇華させることができます。
- ロボットとドローン
ロボット工学では、点群データは探査、障害物回避、SLAM(Simultaneous Localization and Mapping)によく使用さ れます。LiDARを搭載したドローンで取得したデータは、精密農業、野生動物のモニタリング、インフラ整備など、さまざまな分野で活用することができます。
今すぐLiDARアノテーションを始めましょう
点群データは、建築、エンジニアリング、建設、バーチャルリアリティ、自律システムなど、3次元データに依存する多くの産業や分野にとって重要なデータタイプとなっています。自動ラベリング機能を提供するSuperb Labelを使用することで、リソースと手間のかかるラベリング作業を自動化し、チームはより迅速かつ効率的にデータを処理することができます。 より正確な3Dモードルを構築し、AIモデル開発のプロセスを革新するSuperb Labelをお試しください。今すぐ無料トライアルを開始しましょう。